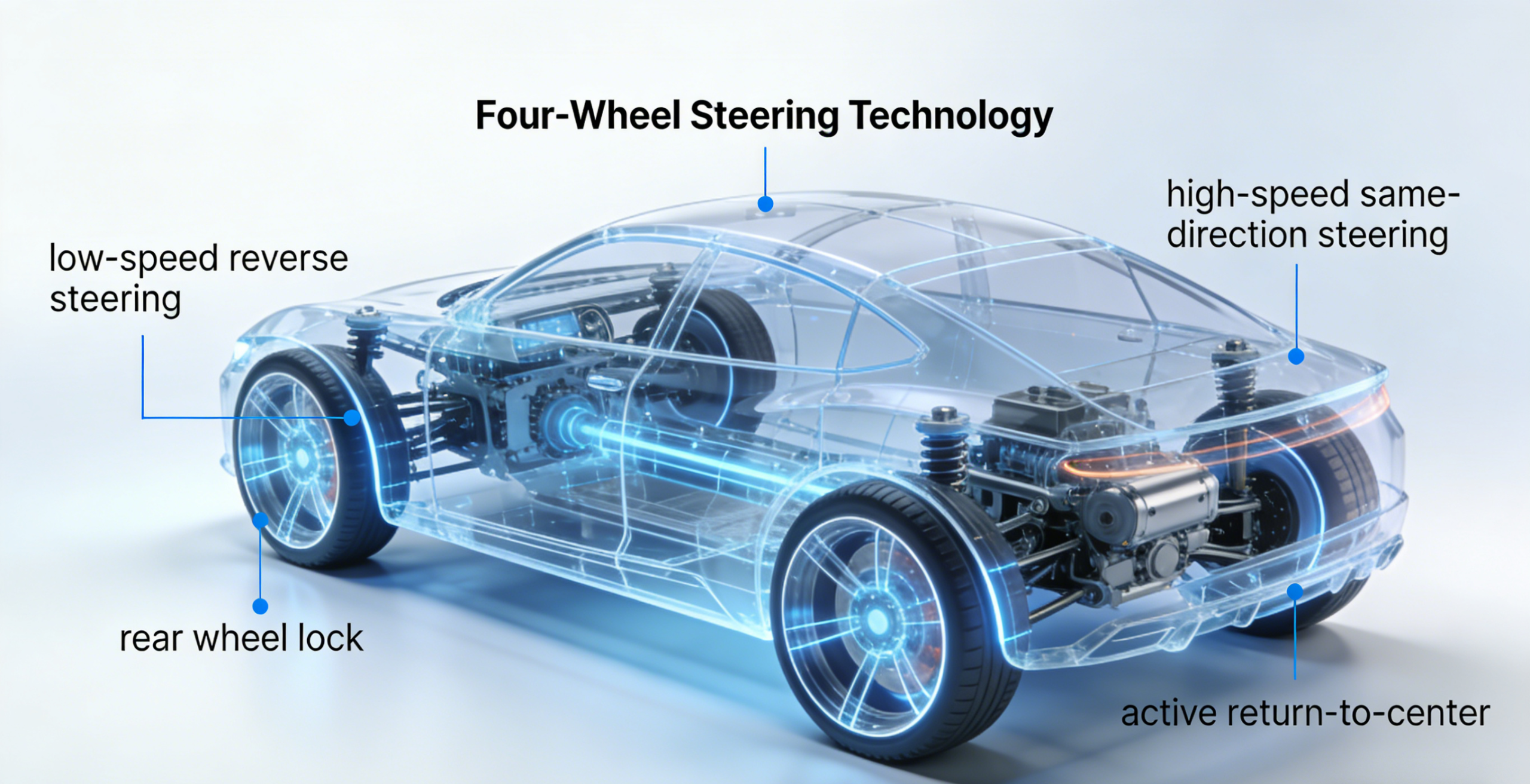
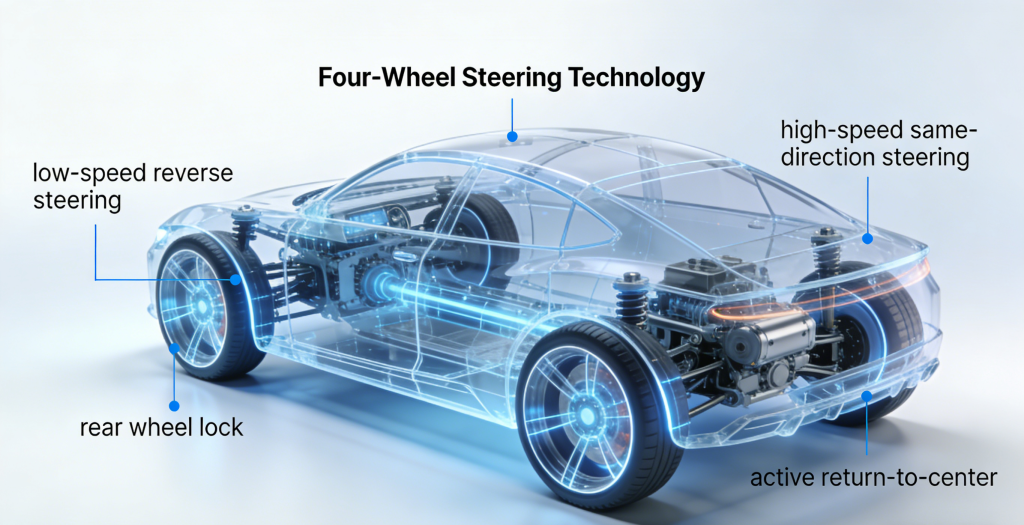
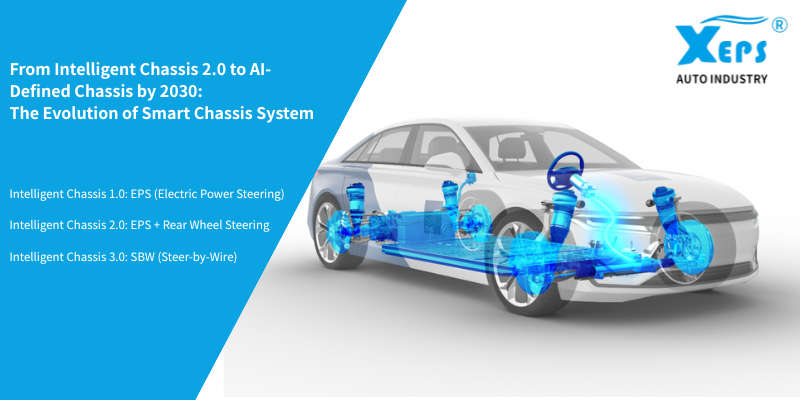
Four-Wheel Steering Technology (4WS) is the core control technology of the XEPS Autonomous Driving Rear-Wheel Steering Test Vehicle, whose core logic focuses on “vehicle speed adaptation + scenario adaptation”. Different from the traditional two-wheel steering system, this 4WS technology achieves flexible coordination of front and rear wheels through precise electronic control, effectively balancing the flexibility of low-speed driving and the stability of high-speed driving. Combined with the two key auxiliary functions of rear wheel locking and active return-to-center, it further enhances the safety and reliability of the test vehicle in autonomous driving scenarios, providing important data support and technical verification for the subsequent mass production and industrial application of the technology.
- Core System
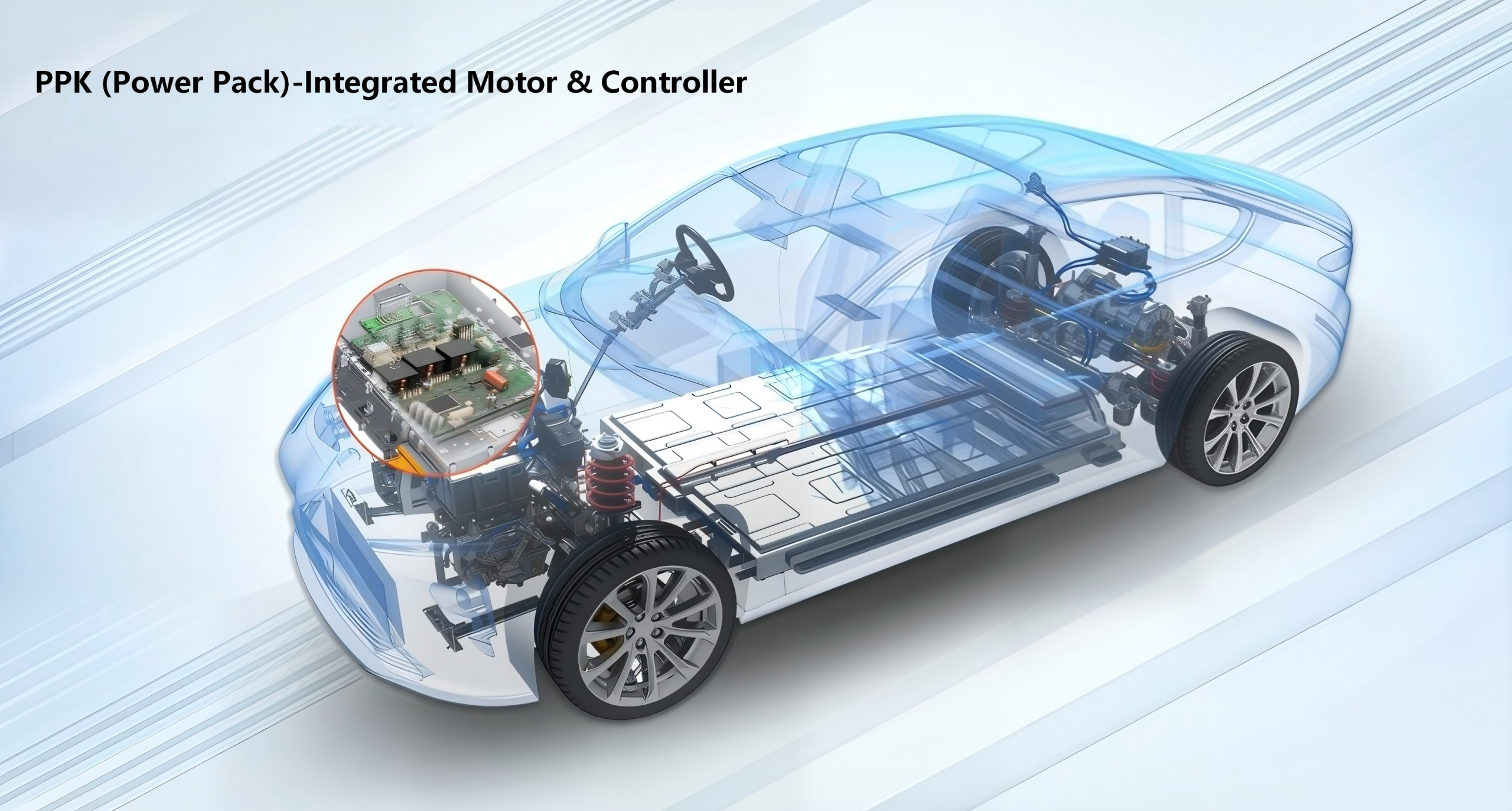
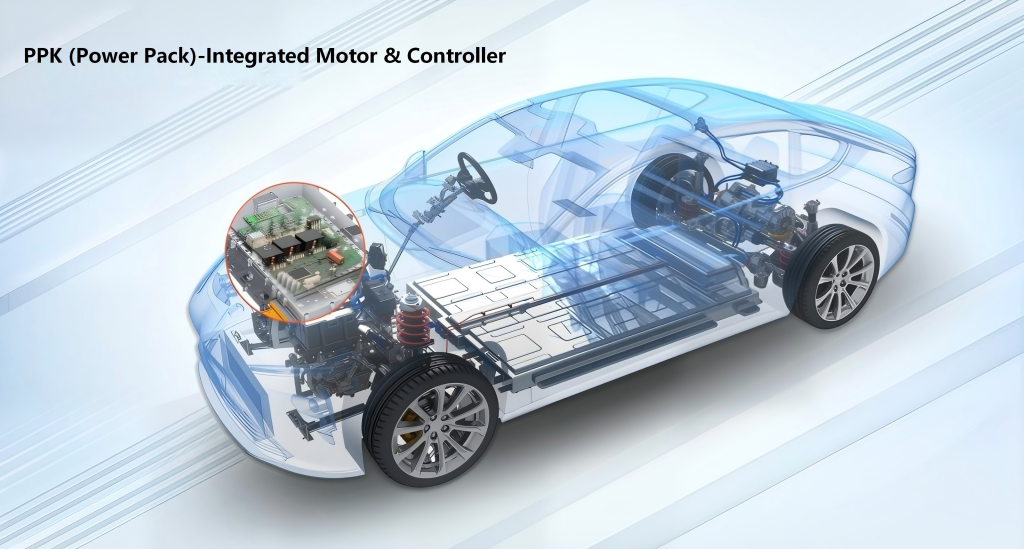
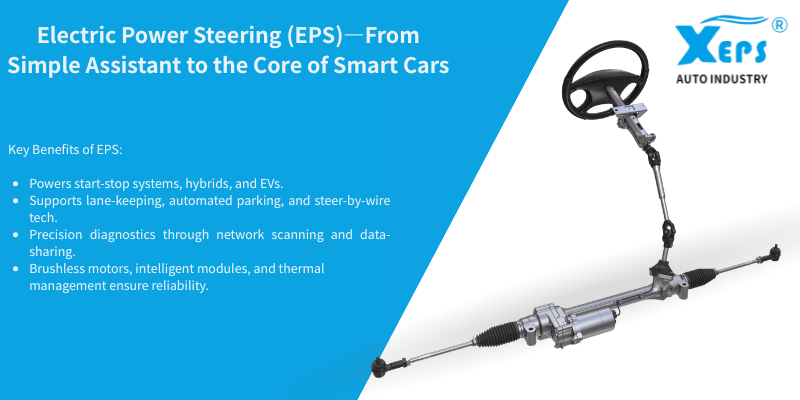
The 4WS system of the XEPS test vehicle adopts a fully electronic control design, abandoning the limitations of traditional mechanical connection, and realizing efficient closed-loop control of “perception-decision-execution”. It mainly consists of three closely coordinated core modules. The perception module, composed of vehicle speed sensors, steering angle sensors and vehicle attitude sensors, can real-time capture key motion data of the vehicle. The decision module, with the Electronic Control Unit (ECU) as the core, quickly analyzes the collected data and issues accurate steering instructions. The execution module, including rear wheel steering gear and stepping motor, accurately executes the instructions to ensure precise and agile steering actions.
- Low-Speed Performance
- At low speeds, the front and rear wheels steer in opposite phases to reduce the turning radius.
- Principle: Front wheels left, rear wheels small-angle right deflection; effectively reduces turning center radius for oblique turning.
- Use Cases: Parking, neighborhood travel, narrow-road U-turn, low-speed autonomous operation in parks.

For low-speed scenarios (≤40km/h) such as parking, community traffic and underground garage driving, the 4WS system adopts a reverse coordinated steering mode. When the vehicle needs to turn or park, the rear wheels will steer in the opposite direction to the front wheels, with the deflection angle controlled at about ±5°. This design indirectly shortens the vehicle wheelbase, greatly reducing the turning radius by about 20% compared with traditional vehicles, enabling the test vehicle to complete U-turns and parking with one steering operation. In addition, the active return-to-center function will automatically reset the rear wheels to the neutral position through the coordination of motor and return spring after steering, ensuring smooth straight-line driving without manual intervention.
- High-Speed Performance
- At high speeds, all wheels steer in the same direction to enhance vehicle stability.
- Principle: Front and rear wheels deflect in the same direction at small angles, achieving near-pure translation.
- Use Cases: Highway cruise, fast lane change, high-speed autonomous operation.
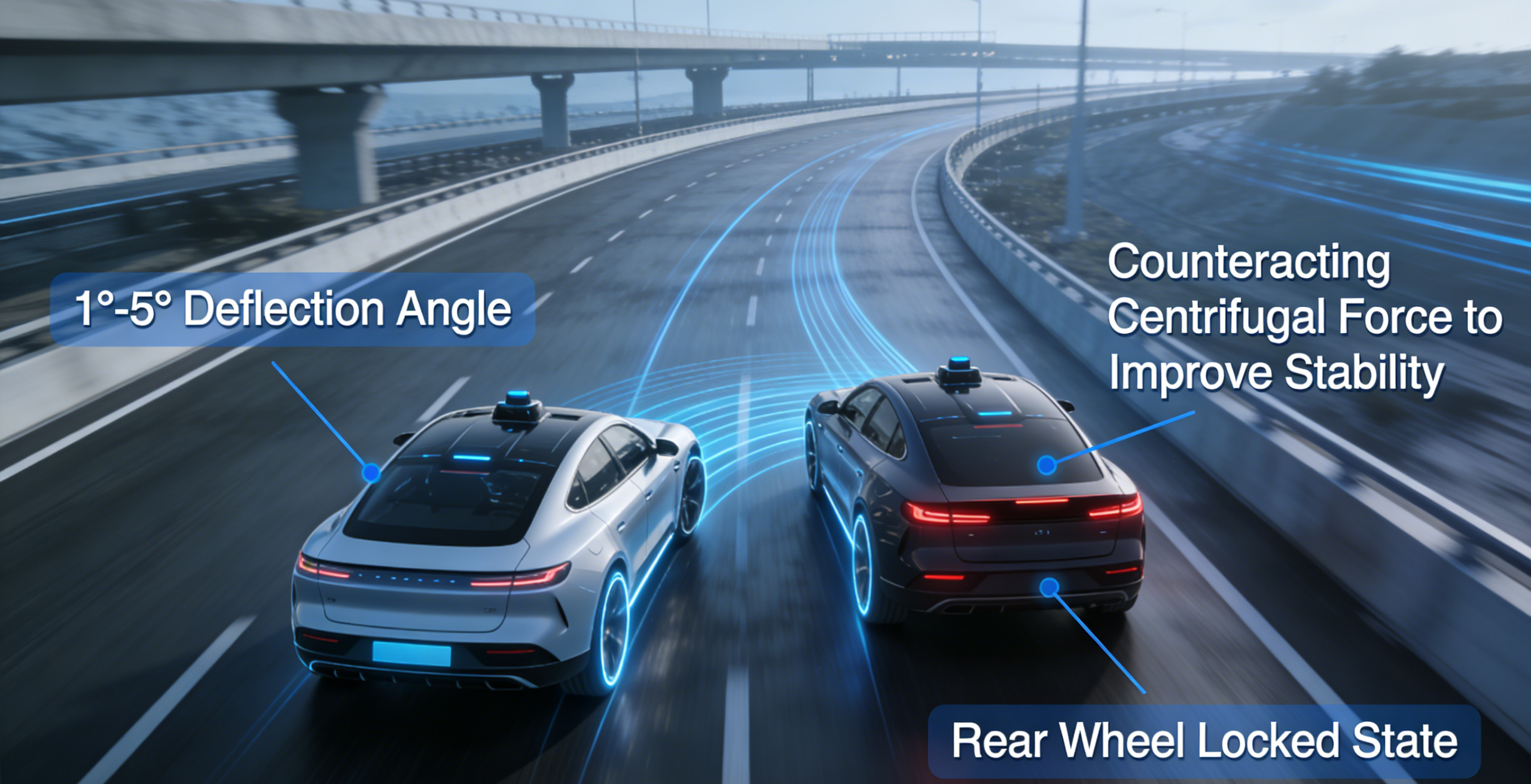
At high speeds (≥80km/h), the stability of the vehicle is the top priority of autonomous driving safety. The 4WS system switches to the same-direction coordinated steering mode. When the vehicle changes lanes or turns at high speed, the rear wheels steer slightly in the same direction as the front wheels, with the deflection angle between 1° and 5°, which can effectively offset the centrifugal force generated by high-speed driving, reduce the risks of vehicle roll and tail flick, and enhance driving stability. When the vehicle drives at a constant high speed without steering instructions, the rear wheels will be locked to avoid unnecessary deflection caused by road bumps, while reducing energy consumption.
- Auxiliary Functions & Value
The electronic rear wheel locking mechanism has fault tolerance and real-time feedback function, which can lock the rear wheels to the neutral position in time when the system malfunctions, ensuring driving safety. The active return-to-center function combines electronic control and mechanical redundancy, which is more reliable and can adapt to different road conditions by adjusting the return-to-center force. This 4WS technology effectively solves the industry pain points of insufficient low-speed flexibility and lack of high-speed stability in autonomous driving, supports full-scenario autonomous driving, accumulates valuable test data for subsequent mass production, and provides a useful reference for the application of four-wheel steering technology in the industry.
For more information, please watch the following video.